 The Pixel Farm PFTrack 2017 жаЮФАц КЌВЙЖЁМЄЛюНЬГЬ
The Pixel Farm PFTrack 2017 жаЮФАц КЌВЙЖЁМЄЛюНЬГЬ
ДѓаЁЃКЮДжЊ
АВШЋЮоЖОУтЗбШэМўЮоЙуИц
The Pixel Farm PFTrack 2017 жаЮФАц КЌВЙЖЁМЄЛюНЬГЬ
ДѓаЁЃКЮДжЊ
АВШЋЮоЖОУтЗбШэМўЮоЙуИц
3DИњзйдкCGЬиаЇЕФжЦзїСїГЬжаЦ№зХЗЧГЃЙиМќадЕФзїгУЃЌЪЧВЛПЩЛђШБЕФвЛИіЛЗНкЃЌЪЧвЛИіЮоаЮЕФCGММЪѕЁЃМђЕЅЫЕЫќЪЧАбЮвУЧШ§ЮЌЖЏЛЛђепЮяЬхгыЪЕМЪХФЩуЪБЕФГЁОАЯрЛњЮЛжУЁЂНЙОрЁЂдЫЖЏЙьМЃЕШБЃГжвЛжТЕФЪЕЯжЙ§ГЬЁЃЫќВЛНіНігІгУгыЕчгАДѓЦЌЕФжЦзїЃЌЮвУЧЦНЪБПДЕНЕФКмЖргЮЯЗЃЌНЈжўТўгЮвдМАЙуИцЦЌЕБжаЖМгаЙуЗКЕФгІгУЁЃФЧУДдкетИіЙ§ГЬжаИњзйШэМўОЭБиШЛЦ№ЕНСЫКмДѓЕФзїгУЁЃ
зїепYvan Galtié
ЬсЦ№3DИњзйШэМўзюжјУћЕФвЊЪ§BoujouСЫЁЃЮвзюПЊЪМНгДЅЪБМЧЕУЪЧ1.0АцБОЕФЁЃВЛЙ§КУЖрФъУЛгаНгДЅЃЌЯждквбОЭќМЧВюВЛЖрСЫЁЃГ§СЫBoujouЃЌжїСїЕФЛЙгаPFTrackЁЂ MochaЁЂMatchmoverЁЂSyntheyesЁЂ 3D-EqualizerЁЂNukeвВгаздДјЕФИњзйЙІФмЁЃ

НёЬьЃЌЮвУЧжївЊЫЕЕФPFTrackетПюИњзйШэМўЁЃPFTrackЪЧ Pixel Farm баОППЊЗЂЕФвЛПюГЩЯѓЮяЬхИњзйШэМўЃЌЫќЪЧРћгУЩуЯёЛњЗДЧѓ,ЪЙЦфЕУЕНецЪЕЩуЯёЛњЕФВЮЪ§ЃЌФмЪЙ3DЮяЬхКЭЪЕМЪХФЩуЮяЬхЭъУРЕФНсКЯдквЛЦ№ЁЃ

Дг2011ФъвдРДЃЌЫћЕФИќаТЖМКмаЁЁЃЕЋЪЧЃЌНќШеЫќЕФПЊЗЂЩЬPixefarmЗЂВМСЫвЛИізюаТАцБО2017ЃЌИќаТСЫДѓВПЗжЕФЙІФмЁЃОпЬхЖМгаФФаЉФиЃПНёЬьЃЌЮвУЧОЭЪ§ТфЯТетИіШэМўЕФИќаТЙІФмЁЃПДПДМИИіЙйЗНЕФЙІФмеЙЪОЪгЦЕЁЃ

гаИќЖржжЗНЪНДДНЈКЭВйПиЩюЖШЭМЃК
ЁєИќаТСЫZ-Depth SolverНкЕу
ЁєZ-Depth TrackerЁЂMergeЁЂEditЁЂFilterЁЂCompositeКЭCacheНкЕу
ЁєЛљгкRotoscopeЕФЩюЖШБрМЕШЕШ
РЉеЙЕФСЂЬхЯрЛњКЭЭМЯёСїГЬЃК
ЁєдкзЗзйЕНзѓблаХЯЂКѓЛсздЖЏЖЈЮЛгвблЮЛжУШЛКѓНЈСЂСЂЬхЯрЛњЃЈStereo CameraЃЉ
ЁєНтОіГЃМћЕФЮЪЬтЃЌШчСЂЬхЬнаЮЖдЦыКЭзѓбл/гвблЕФбеЩЋгыНЙЕуВЛЦЅХфЕШЮЪЬт
ЁєЪЙгУЕЅЦЌZ-DepthЪ§ОнфжШОзѓгвблЭМЯёЁЃ
ИќаТСЫгУЛЇНчУц
ЁєНкЕуДДНЈУцАхЖМРћРћЫїЫїЕФАДЗжРрЗжзщСЫЁЃ
ЁєПЩвдздЖЈвхНкЕузщЃЌАбФуОГЃгУЕФНкЕуПЩвдИљОнздМКЕФашвЊЗХдквЛИізщРяЁЃ
ЁєЛЙгаЪїаЮВМОжКЭдЄЩшXMLЮФМўЕШЕШЁЃ
жЇГжЪ§зжЕчгАЩуЯёЛњ
ЁєПЩвдЖСШЁARRI RAWУНЬхЮФМў
ЁєДгREDКЭARRIдДЮФМўжаздЖЏЖСШЁЯрЛњКЭОЕЭЗдЊЪ§ОнЁЃ
ЁєвВПЩвдДгDRXЃЌOpenEXRЛђепQuicktime ProResЮФМўжаЖСШЁARRIдЊЪ§Он
ЁєЫљгадЊЪ§ОнПЩвдЭЈЙ§PythonЛђепExportНкЕуЗУЮЪЁЃ

ЯШНјЕФЩугАВтСПЮЦРэЬсШЁЙЄОп
ЁєдкPhoto MeshНкЕуРяПЩвдздЖЏЕФДДНЈвЛИігХЛЏКУЕФЮЦРэЬљЭМ
ЁєПЩвдздЖЏЕФОРе§дДУНЬхжаЕФЦиЙтКЭССЖШВювьЬсЙЉСМКУЕФжЪСПЮЦРэЬљЭМЁЃ
ЁєдкМђЛЏЪБПЩвдЩњГЩЗЈЯпЃЌжУЛЛКЭБеКЯЬљЭМЃЌШЗБЃМђЛЏЭјИёЮяЬхШдФмОЁПЩФмБЃГжЪгОѕБЃецЖШЁЃ
ЁєЭЈЙ§ExportНкЕуПЩвдздЖЏЕМГіЮЦРэЬљЭМЕШЕШЁЃ

ЮЊЩюЖШДЋИаЦїзїЕФЪЕбщадRGBDСїГЬ
ЁєAuto Track КЭUser Track nodesПЩвдЮЊИњзйепдкУПвЛжЁЖСШЁZ-depthжЕЁЃ
ЁєCamera SolverЪЙгУИњзйЕФZ-depthжЕАяжњНтОіЯрЛњдЫЖЏ
ЁєдкИДдгЕФЯрЛњдЫЖЏИњзйжаЬсИпОЋШЗЖШЁЃ
ЁєВЛгУШЮКЮЦфЫћВНжшПЩвдЬсЙЉецЪЕЪРНчЕФБШР§ЁЃ
ЁєПЩвдЪЙгУIPadКЭOccipitalЕФStructure SensorЃЈвЛПюБуаЏЪН3DЩЈУшвЧЃЉВЖзНЩшБИМЧТМЩюЖШЪ§ОнЕШЕШЁЃ

гаИќЖржжЗНЪНДДНЈКЭВйПиЩюЖШЭМЃК
ЁєИќаТСЫZ-Depth SolverНкЕу
ЁєZ-Depth TrackerЁЂMergeЁЂEditЁЂFilterЁЂCompositeКЭCacheНкЕу
ЁєЛљгкRotoscopeЕФЩюЖШБрМЕШЕШ
РЉеЙЕФСЂЬхЯрЛњКЭЭМЯёСїГЬЃК
ЁєдкзЗзйЕНзѓблаХЯЂКѓЛсздЖЏЖЈЮЛгвблЮЛжУШЛКѓНЈСЂСЂЬхЯрЛњ(Stereo Camera)
ЁєНтОіГЃМћЕФЮЪЬтЃЌШчСЂЬхЬнаЮЖдЦыКЭзѓбл/гвблЕФбеЩЋгыНЙЕуВЛЦЅХфЕШЮЪЬт
ЁєЪЙгУЕЅЦЌZ-DepthЪ§ОнфжШОзѓгвблЭМЯёЁЃ
ИќаТСЫгУЛЇНчУц
ЁєНкЕуДДНЈУцАхЖМРћРћЫїЫїЕФАДЗжРрЗжзщСЫЁЃ
ЁєПЩвдздЖЈвхНкЕузщЃЌАбФуОГЃгУЕФНкЕуПЩвдИљОнздМКЕФашвЊЗХдквЛИізщРяЁЃ
ЁєЛЙгаЪїаЮВМОжКЭдЄЩшXMLЮФМўЕШЕШЁЃ
жЇГжЪ§зжЕчгАЩуЯёЛњ
ЁєПЩвдЖСШЁARRI RAWУНЬхЮФМў
ЁєДгREDКЭARRIдДЮФМўжаздЖЏЖСШЁЯрЛњКЭОЕЭЗдЊЪ§ОнЁЃ
ЁєвВПЩвдДгDRXЃЌOpenEXRЛђепQuicktime ProResЮФМўжаЖСШЁARRIдЊЪ§Он
ЁєЫљгадЊЪ§ОнПЩвдЭЈЙ§PythonЛђепExportНкЕуЗУЮЪЁЃ
ЯШНјЕФЩугАВтСПЮЦРэЬсШЁЙЄОп
ЁєдкPhoto MeshНкЕуРяПЩвдздЖЏЕФДДНЈвЛИігХЛЏКУЕФЮЦРэЬљЭМ
ЁєПЩвдздЖЏЕФОРе§дДУНЬхжаЕФЦиЙтКЭССЖШВювьЬсЙЉСМКУЕФжЪСПЮЦРэЬљЭМЁЃ
ЁєдкМђЛЏЪБПЩвдЩњГЩЗЈЯпЃЌжУЛЛКЭБеКЯЬљЭМЃЌШЗБЃМђЛЏЭјИёЮяЬхШдФмОЁПЩФмБЃГжЪгОѕБЃецЖШЁЃ
ЁєЭЈЙ§ExportНкЕуПЩвдздЖЏЕМГіЮЦРэЬљЭМЕШЕШЁЃ
ЮЊЩюЖШДЋИаЦїзїЕФЪЕбщадRGBDСїГЬ
ЁєAuto Track КЭUser Track nodesПЩвдЮЊИњзйепдкУПвЛжЁЖСШЁZ-depthжЕЁЃ
ЁєCamera SolverЪЙгУИњзйЕФZ-depthжЕАяжњНтОіЯрЛњдЫЖЏ
ЁєдкИДдгЕФЯрЛњдЫЖЏИњзйжаЬсИпОЋШЗЖШЁЃ
ЁєВЛгУШЮКЮЦфЫћВНжшПЩвдЬсЙЉецЪЕЪРНчЕФБШР§ЁЃ
ЁєПЩвдЪЙгУIPadКЭOccipitalЕФStructure Sensor(вЛПюБуаЏЪН3DЩЈУшвЧ)ВЖзНЩшБИМЧТМЩюЖШЪ§ОнЕШЕШЁЃ
1.ДђПЊШэМўЃЌетЪЧШэМўЕФЛЖгНчУцЁЃ

2.ЕуЛїЮФМўЁЗаТНЈЯюФПРДДДНЈвЛИіЯюФПЁЃ
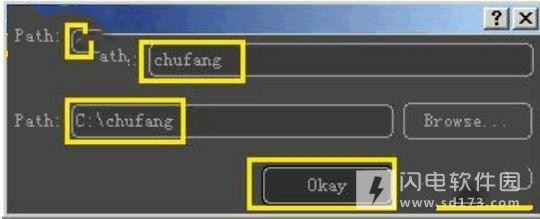
3.дкЯюФПЖдЛАПђЕФ“ЯюФПУћГЦ”РИЪфШы“chufang”жИЖЈ“ТЗОЖ”ЮЊC:\chufangЃЌШЛКѓЕуЛїOKayАДХЅШЗЖЈЁЃ
4.ЕуЛїЙЄОпРИЩЯЕФ“диШыађСаЮФМў”АДХЅЁЃ

5.Дг“диШыађСаЮФМў”УцАхжабЁдёвбОВЩМЏЕФвЛИіЮФМўЃКchufang.avi
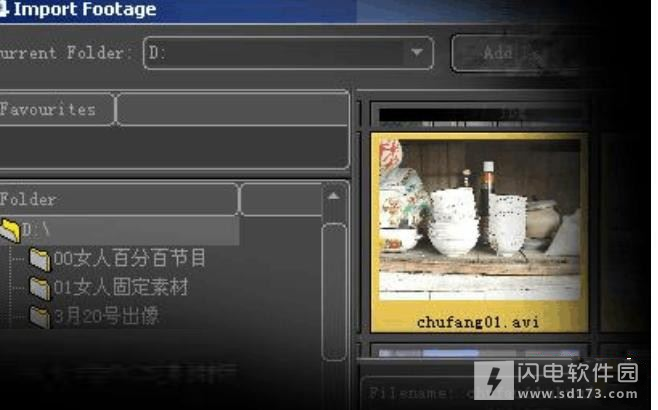
6.ЕуЛї“диШыађСаЮФМў”УцАхгвЯТНЧЕФ“диШы”АДХЅЁЃ

7.ЪгЦЕЮФМўЯдЪОдкГЁОАжаЁЃ
8.ЕуЛїЙЄОпРИЩЯЕФ“здЖЏИњзй”АДХЅЁЃ
9.ИњзйЙ§ГЬПЊЪМЃЌЯдЪОГіИњзйзДЬЌУцАхЃЌГЁОАжавВГіЯжСЫвЛаЉИњзйЕуЁЃ
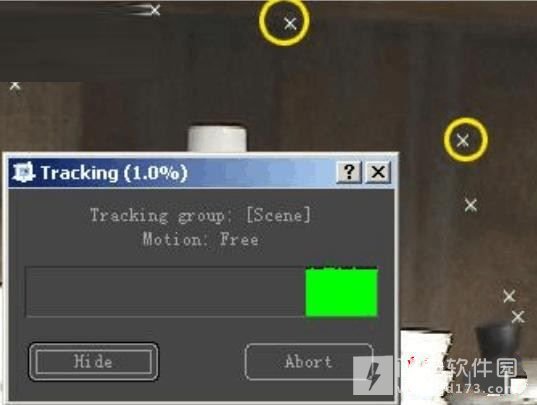
10.ИњзйНјаажа...

11.ШэМўПЊЪМЗДЯђИњзйЃЌВЛжЊетИіВНжшЕФзїгУЪЧЪВУД?
12.ИњзйЭъБЯЃЌЧѓНтЩуЯёЛњЕФАДХЅБфЮЊПЩгУЃЌЕуЛїетИіАДХЅЁЃ
13.дкЕЏГіЕФЧѓНтГЁОАЕФЖдЛАПђжаЕуЛї“ПЊЪМ”АДХЅЃЌНјааЩуЯёЛњЕФЧѓНтЁЃ

14.ЩуЯёЛњЧѓНтЙ§ГЬПЊЪМЁЃ
15.ЩуЯёЛњЧѓНтЭъБЯЃЌЪгЦЕЭМЯёЩЯГіЯжСЫвЛаЉТЬЩЋКЭКьЩЋЕФаЁдВЕуЁЃ
16.дкЦСФЛзѓБпЕФ“ЩуЯёЛњЪфГі”ЩЯгвЛїЪѓБъЃЌдкЕЏГіЕФЯТРВЫЕЅжабЁдё“аТНЈ”
17.дкГЁОАЪфГіЖдЛАПђжаЩшжУЃКЪфГіИёЪНЮЊ.ms(maxЕФНХБОГЬађИёЪН);ЪфГіТЗОЖКЭУћГЦ(chufang.ms)ЃЌзюКѓЕуЛїOkeyЪфГіГЁОАЁЃ
18.ЦСФЛзѓБпЕФЩуЯёЛњЪфГіЯюФПЯТЃЌЛсГіЯжвЛИіЪфГіЕФНХБОЮФМўЬсЪОЁЃ
19.ЙиБеPFTrackЃЌДђПЊ3ds maxЃЌЕуЛїНХБОВЫЕЅЯТЕФдЫааНХБОЯюЃЌбЁдёИеВХБЃДцЕФchufang.msЮФМўВЂбЁдёДђПЊ
20.ГЁОАжаздЖЏДДНЈСЫвЛИіЩуЯёЛњЃЌИњзйЕувВБЛЕМШыЁЃгЩгкЩуЯёЛњФЌШЯДІгкбЁдёзДЬЌЃЌЫљвддкЪБМфЯпЩЯПЩвдПДЕНУмУмТщТщЕФЙиМќжЁЁЃ
21.диШыГјЗП.aviзїЮЊГЁОАЕФБГОАЁЃ
22.НЋГЁОАжаЕФЩуЯёЛњКЭЫљгаЕФИњзйЕуШКзщЦ№РДЃЌВЂЭЈЙ§вЦЖЏЁЂа§зЊЕШВйзїЃЌЪЙЩуЯёЛњЕФЭјИёКЭГЁОАБГОАЭјИёЖдЦыЁЃзЂвтзюЯТУцвЛаЉЕуЪЧдкЫЎЦНЯпЩЯЁЃ
23.дкГЁОАжаМгШыМИИіЮяЬхРДНјааВтЪдЁЃ
24.жЦзївЛИіЖЏЛдЄРРРДЙлПДаЇЙћЁЃ
НсЙћЯдЪОЃЌИњзйаЇЙћСМКУЃЌЩйЪ§МИжЁгааЉЬјЖЏЃЌЛЙВЛжЊЕРдѕУДаоИФЃЌвђЮЊЯждкЛЙЪЧК§РяК§ЭПЕидкИњзйЁЃ
еЙПЊ
гбЧщЬсабЃКЧыЕуЛїгвЩЯНЧЕФЮЂаХВЫЕЅбЁдёЪЙгУфЏРРЦїДђПЊЯТдиЃЈвђЮЊЮЂаХжаВЛЬсЙЉЯТдиЙІФмЃЉ,ЕуЛїШЮвтДІПЩЙиБеИУЬсЪОаХЯЂ,аЛаЛ~