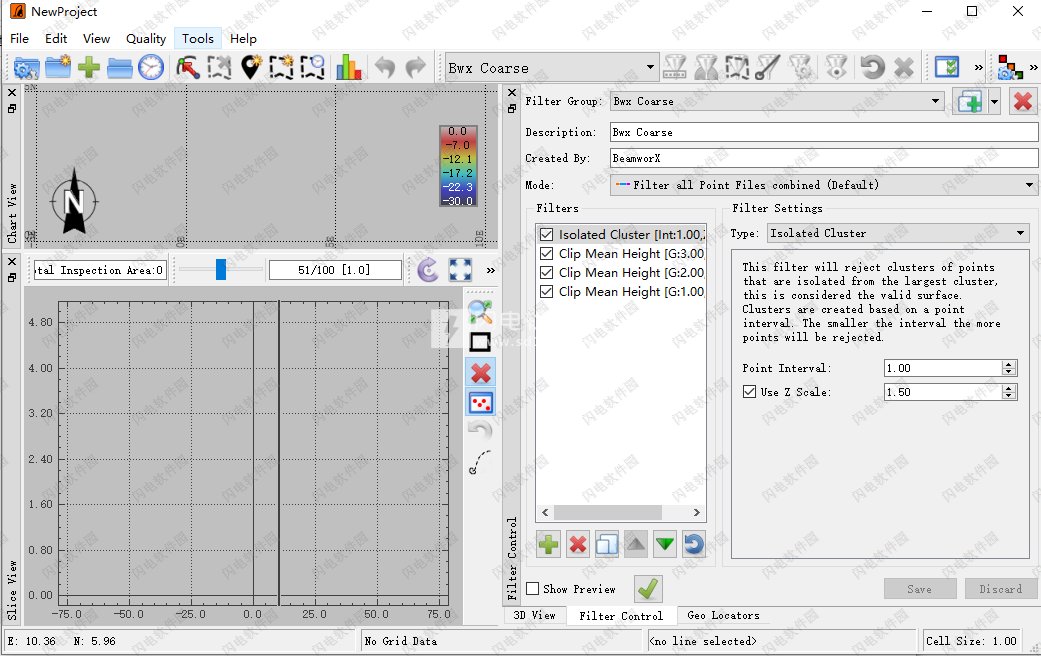
AutoClean破解版使用旨在快速处理点数据集。它可以自动加载和清理数据。各种报告工具可帮助用户验证数据质量。包括多个程序,AutoClean能够以简单的方式清理和验证调查结果数据!NavAQ 是一个用户友好的多功能在线导航和数据采集程序,适用于单/多波束测深仪
AutoClean破解版使用旨在快速处理点数据集。它可以自动加载和清理数据。各种报告工具可帮助用户验证数据质量。包括多个程序,AutoClean能够以简单的方式清理和验证调查结果数据!NavAQ 是一个用户友好的多功能在线导航和数据采集程序,适用于单/多波束测深仪和激光扫描仪。AutoPatch是全自动多波束测深仪和激光扫描仪贴片测试计算器,只需单击一下即可获得校准报告!SBEdit是用户友好的单光束编辑器!SBEdit 使在以原始声学为背景的图表基准中编辑单波束测深仪数据 (SBE) 变得非常容易。背景可以更容易地决定如何编辑数字化的高频和低频(HF 和 LF)。最新破解版下载,欢迎有需要的朋友来本站下载体验!
2021.3新功能
1、AutoClean
1、平减速机
添加了一个过滤器,可以通过“ping-by-ping”减速器过滤器减少接受点的数量。
此过滤器拒绝作为ping一部分的足迹。支持各种设置。
2、各种错误修复/小改进
此AutoClean版本的重点是提高程序的整体质量。进行了许多错误修复和小改进。
二、NavAQ
1、Grid–支持多层
现在可以完全自定义使用的测深网格,可以添加多个层。这些层可以填充回声测深仪结果,但也可以用于在配置文件和图表视图显示中导入和可视化设计/参考数据。
2、疏浚倾倒
通过海湾或彩虹增加了对疏浚倾倒的支持。这会更新网格。
3、TPU计算
添加了总传播不确定性(TPU)计算器。该计算基于荷兰RWS AMUST方法。它必须在测量配置中激活,此处还应输入所用系统的所有参数。TPH和TPV值可以在网格层中可视化,但也是bwxres文件的一部分。
4、锚点处理
NavAQ中添加了基本的锚点管理。锚点状态可以显示在显示器中,也可以由通用驱动程序输出。锚点动作由手动输入驱动程序“驱动”。操作存储在锚点日志文件中。
5、新的NavAQ驱动程序
为以下系统添加了新驱动程序:
-Advantech ADAM I/O单元
-Hesai Pandar系列激光扫描仪
-Knudsen Echosounder系列
-Imagenex DT360-
时间输出驱动器
功能特色
1、测深和激光雷达点云的自动清洁和验证pdf-下载
2、在2D切片和3D视图中手动标记点
3、带有直接安装程序的独立应用程序
4、易于学习和使用
5、最佳使用现代硬件(多核、64位、GB内存)
6、支持多种自动清理算法:统计、样条滤波器、空间相干
7、完全撤消所有修改操作
8、导入和导出各种文件格式,例如FAU/GSF/Kongsberg ALL+KMALL/PDS/ASCII/LAS/LAZ/Hypack HS2、HS2X/Grids
9、尊重采集软件标记的点状态
10、潮汐误差的自动最小二乘调整高度拟合
11、设计或先前调查的参考层
12、可选择仅将更改导出回原始源文件
13、拖放区域选择
14、调查期间通过文件夹监控自动导入和过滤文件
15、专用单光束编辑器(SBEdit)作为附加组件提供
16、可选择在导入期间重新处理原始多波束数据,可作为附加组件使用
17、图表视图背景层:CAD/DXF、GeoTiff、Webmap(谷歌地图、OpenStreetMap)
18、目标/兴趣点处理(地理定位器)
安装激活教程
1、本站下载并解压,如图所示
 2、勾选我接受协议
2、勾选我接受协议
 3、安装位置
3、安装位置
 4、安装完成,退出向导,不要启动,将破解补丁文件复制到目录中,替换
4、安装完成,退出向导,不要启动,将破解补丁文件复制到目录中,替换

闪电小编说明:
使用智能(自动)过滤器清理您的(MB)数据。它有效。快速、高效、可靠。从一开始就使用AutoClean,此后进行了很多改进。由于BeamworX倾听最终用户的输入,并提出了更聪明的方法来导入、清理、呈现和输出您的数据,因此它不断变得更好。能够倾听用户的愿望并将其转化为高效的软件,为用户节省了大量的时间,从而能够在更短的时间内创建更可靠的产品
 BeamworX Autoclean 2021.3.1.0 激活版
BeamworX Autoclean 2021.3.1.0 激活版
 牙科CAD设计软件 exocad Dental
牙科CAD设计软件 exocad Dental Synopsys CoreTools vW-2024.09-
Synopsys CoreTools vW-2024.09- AviCAD 2025 Pro 25.0.10.5 x64
AviCAD 2025 Pro 25.0.10.5 x64  Synchro plus SimTraffic 12.2.5
Synchro plus SimTraffic 12.2.5 Kenny Asset Forge 2.5.0
Kenny Asset Forge 2.5.0 CPFD Barracuda Virtual Reactor
CPFD Barracuda Virtual Reactor