Trimble Inpho Photogrammetry 15破解版是行业领先的数字摄影测量软件!使用旨在为用户提供更精准更强大的传统机载摄影测量/机载LiDAR处理解决方案,全面的功能,完整的工作流程,立即交付高质量的成果,提高生产力,节省资源成本!提供高度自动化的解决方案
Trimble Inpho Photogrammetry 15破解版是行业领先的数字摄影测量软件!使用旨在为用户提供更精准更强大的传统机载摄影测量/机载LiDAR处理解决方案,全面的功能,完整的工作流程,立即交付高质量的成果,提高生产力,节省资源成本!提供高度自动化的解决方案,从而让用户更有信心且更准确的完成任务,适应逐渐增长的市场需求,全新13版本带来更更多的功能和增强,OrthoVista 显着提高了生产力,生成正射镶嵌图的速度比以前的版本快 13 倍。通过在 Trimble Inpho 工作流程中集成新的第一阶段多头相机,新的软件版本提供了处理第一阶段数据集的简化功能。除此之外,用户还将受益于对 Windows 服务器和 CITRIX 环境的多用户扩展支持,以及更高质量的 3D 网格 MATCH-3DX。破解版下载,含patch补丁,欢迎有需要的朋友下载体验!
新功能
航空影像工程工作流改进
匹配 AT: 现在,借助新的 Trimble RealRay 技术,这是一种复杂的数学模型,旨在精确估计和校正由大气折射、映射投影和大地水准面影响等因素引起的图像失真
MATCH-T DSM / MATCH-3DX: 更全面的 LAS 和 LAZ 文件支持意味着在整个工作流程中支持点数据记录格式 (PDRF) 和 ExtraBytes
匹配 3DX: 改进了电线、栏杆和桅杆等薄结构的重建。通过提供优化的颜色调整以及更快的网格转换速度来增强网格转换过程,以实现优化处理。
MATCH-AT 和新的 Trimble RealRay 技术
新版本包括在 MATCH-AT 中引入突破性的 RealRay 技术。此次更新代表了航空三角测量软件的重大飞跃,通过显著减少环境因素引起的误差,提供了前所未有的精度。
“精确”校正模式的引入将相机校准和地理配准提升到无与伦比的精度水平,确保所有成像项目的卓越质量。此外,MATCH-AT v15.0 中简化的工作流程简化了复杂的流程,使用户能够更有效地获得最佳结果,最终提高整体生产力。通过不断集成最新的进步,MATCH-AT 使用户能够自信地应对航空测量的未来挑战。
MATCH-AT v15.0 提供领先的技术,能够以无与伦比的精度处理各种块场景。MATCH-AT 在许多项目条件下具有高度的通用性,包括高海拔飞行、多头系统、倾斜飞行和具有挑战性的山区地形,可在任何项目中提供一致和可靠的结果,尤其是在覆盖范围较大的坐标系中具有特别的精度。
此更新不仅通过实现更准确和更高质量的交付成果为用户提供了竞争优势,而且还节省了大量成本。返工和手动更正的需求大大减少,使整个过程更加高效。
对 PDRF 和 ExtraBytes 的全面 LAS 和 LAZ 支持
Inpho 现在在整个工作流程中支持 PDRF 和 ExtraBytes,确保用户可以导入、导出、编辑、处理和转换数据,而不会丢失或妥协。
敏感数据在每个阶段都受到保护,具有最高的安全性和完整性。用户可以利用最新的传感器技术并将其与 Inpho 无缝集成。这种前瞻性的方法保护了软件和硬件的投资,使其能够轻松适应未来的发展。
简化的作可简化工作流程,减少对变通方法或外部工具的需求,节省时间并最大限度地减少错误,确保项目准确、按时完成。
通过改进的数据集提供检查和施工机会
改进了包含薄结构(如电力线、栏杆和桅杆)的数据集的重建质量和运行时间,为检查工作流程提供了更清晰、更好的结果,特别是对于具有大量冗余记录的复杂实体。这开辟了新的市场领域,例如检查、施工和复杂结构项目,从而获得高质量的结果,让您保持竞争力。
通过提供优化的颜色调整以及更快的网格转换速度来优化处理,从而增强了网格转换过程。
其他增强功能
最新版本包括多项增强功能,以提高性能和用户体验。减少了 MATCH-3DX 的内存消耗,无需交换光盘即可处理较大的项目。统计计算输出已得到改进,增加了影像残差、立体像对的选择性列表和增强的汇总线。该软件现在可以生成与 3D Tiles 1.1 兼容的网格,并改进了 OBJ 网格与第三方应用程序的兼容性。
为了提高用户的易用性,西班牙语用户界面已经过修改,并增加了翻译。内部图像库已更新,以便更好地处理损坏的图像。此外,DJI Matrice 30 (M30T) 相机已添加到传感器数据库中,支持在导入图像时自动创建。
更新到最新版本的 Inpho
Inpho v15.0 引入了重要的增强功能,更新到最新版本并改进了您的航空摄影测量工作流程。
发行说明适用于 Trimble Inpho v15.0
在 TBC 中处理时,质量类别控制现在可用并推荐使用。
1、在Trimble Inpho工作流程中集成第一阶段相机
在之前的版本中,Phase One相机和平台的处理方式与市场上的其他图像传感器一样。通过Trimble Inpho和Phase One之间的新合作,Phase One的SDK现在已集成到Inpho工作流程中。用户现在可以通过导入IIQ Phase One格式的图像并根据项目编辑器和相机编辑器中的预定义模板自动设置项目来提高工作效率。第一阶段相机集成中的这一自动化步骤通过减少项目设置的时间并通过手动定义参数降低错误风险来简化和确保项目效率。在版本13中,高精度大幅面天底传感器PAS 280和大幅面多头传感器PAS 880集成到工作流程中。
2、MATCH-AT中更强大、更快的图像匹配在
上一个版本中,MATCH-AT引入了更新、更强大的匹配引擎。在MATCH-AT版本13中,图像匹配的鲁棒性更高,这使用户可以更好地处理具有挑战性的区域,例如森林或纹理和对比度较差的区域。用户还可以在匹配山区和丘陵地形的项目以及倾斜图像中获得更大的适应性,其中比例和视角可以随着图像的变化而变化。匹配算法的敏感性可以在此版本中根据区域类型、图像内容进行设置,从对比度较低的森林到具有各种对象和更多对比度的城市。随着过程中缓存的激活,匹配时间也加快了30%。
3、OrthoVista的性能呈指数级提升在
过去的几十年中,OrthoVista在摄影测量产品线的质量和可靠性方面展示了其传统。该产品以其在色彩平衡和均匀镶嵌正射影像方面的强大功能而闻名,特别是对于大型影像项目。用户现在可以从OrthoVista中指数级更高的性能中受益,它通过生成正射镶嵌图的速度比以前的版本快13倍,从而提高了生产力。
4、针对Windows Server和CITRIX的扩展Inpho功能
在版本13中,项目经理将受益于生产力的提高,这是因为增加了一项功能,允许用户在高度安全的服务器环境中使用高性能机器运行并行项目。在此版本中通过多用户访问,文件结构已从机器范围转移到用户范围,这对于在Windows Server和CITRIX环境中工作的客户来说是一项重要的可用性改进。
5、扩展多用户访问以提高协作和生产力
MATCH-T DSM、OrthoMaster和OrthoVista的多用途限制已被删除,因此只要有足够的许可证可用,多个用户就可以同时在同一台机器上工作。在Trimble Inpho版本12中,对MATCH-AT的限制也被删除。对于希望将Inpho的扩展功能用于CITRIX或Windows Server环境或远程工作空间的项目经理来说,此功能非常有用。
6、MATCH-3DX中改进的3D网格方法以获得更高的质量
在这个版本中,MATCH-3DX提供了一种新的网格生成算法,基于匹配中更智能的图像选择,增加了3D模型的真实感。此外,由于新的网格纹理技术的发展,用户可以生成更高质量的网格。视觉一致性的显着变化可以通过减少由移动物体(例如,汽车、水反射、变化的照明条件等)引起的伪影来体现。
7、MATCH-3DX的可用性改进
在这个版本中,有几个可用性功能将允许项目经理使用MATCH-3DX更好地管理可交付成果的生产。由于增加了参数的自动预检查,现在确保了多头项目的无缝处理,这提供了最适合的方案以及质量的详细进度更新。状态文件Match.status中有一些附加功能,用于调查问题和有效导入DEM区域。瓦片大小的自动增加(最多2倍)也将保证用户的进程中断,并避免在超出瓦片大小限制时从头开始。
8、在MATCH-3DX中更好地处理大型项目
DPMaster中已经实现了大型项目的自动拆分和合并,用于MATCH-3DX中的分布式处理。在版本13中,用户现在可以自动将大型项目的生产拆分为更小的部分,并按顺序对其进行子处理。此功能对于希望在开始整个过程之前仅处理一个或部分切片以评估文件质量的用户非常重要。处理后的图块可以自动合并在一起。
9、在MATCH-3DX中为清理过的真正射影像提供更好的性能
由于在此版本中优化了真正射影像生成的边界线,可以根据可用模型和折叠参数定义最佳处理区域,从而减少处理时间。
安装激活教程
1、安装包如图所示
2、根据提示依次安装,勾选如下选项
3、安装文件夹
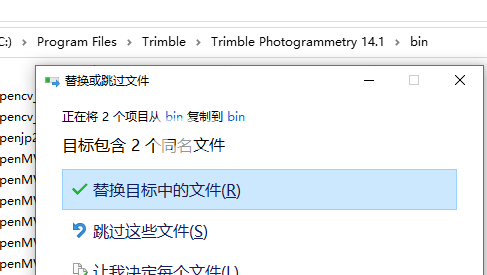
4、安装完成,对于UASMaster,将文件复制到“install-dir”>>bin
闪电小编说明:
模块化软件,涵盖了完整的工作流程,强大的功能,从地理参考到最终成果交付都具有自动化工作流,适用于海量数据的处理,提高效率,更准确更便捷,先进的解决方案,轻松集成到任何摄影测量生产工作流程中。该产品组合还包括用于海量数据的点云和地形建模,以及由自动化城市建模软件完成的机载LiDAR扫描处理。
 Trimble Photogrammetry 2025 v15.0.5激活版
Trimble Photogrammetry 2025 v15.0.5激活版
 牙科CAD设计软件 exocad Dental
牙科CAD设计软件 exocad Dental Synopsys CoreTools vW-2024.09-
Synopsys CoreTools vW-2024.09- AviCAD 2025 Pro 25.0.10.5 x64
AviCAD 2025 Pro 25.0.10.5 x64  Synchro plus SimTraffic 12.2.5
Synchro plus SimTraffic 12.2.5 Kenny Asset Forge 2.5.0
Kenny Asset Forge 2.5.0 CPFD Barracuda Virtual Reactor
CPFD Barracuda Virtual Reactor Trimble Inpho Photogrammetry 11.0.7 补丁激活教程
Trimble Inpho Photogrammetry 11.0.7 补丁激活教程