DYNAMEQ破解版是领先的交通规划模拟软件!提供领先的技术,快速进行准确详细的评估分析和详细直观的演示,是一系列运营模型应用和评估的理想选择,包括拥堵缓解策略、走廊和车道管理、施工缓解、交通设计(包括交通信号优先方案)、交通影响研究、排放建模、
DYNAMEQ破解版是领先的交通规划模拟软件!提供领先的技术,快速进行准确详细的评估分析和详细直观的演示,是一系列运营模型应用和评估的理想选择,包括拥堵缓解策略、走廊和车道管理、施工缓解、交通设计(包括交通信号优先方案)、交通影响研究、排放建模、事件规划等。基于DYNAMEQ仿真的动态交通分配的稳定性、可靠性和计算效率的提高也为DTA和出行预测的集成应用提供了坚实的基础。DYNAMEQ 23.0.0为交通模拟器引入了CAV(联网自动车辆)功能,几个基于类的选项为基于模拟的矩阵调整程序提供了更大的灵活性和控制,新的场景创建功能包括从Aimsun文件导入和更新的CUBE导入器,以及对路径编辑和验证的增强,控制计划生成、热启动DTA和遍历矩阵计算。破解版下载,欢迎有需要的朋友下载体验!

23.0新功能
1、联网/自动驾驶车辆(CAV)
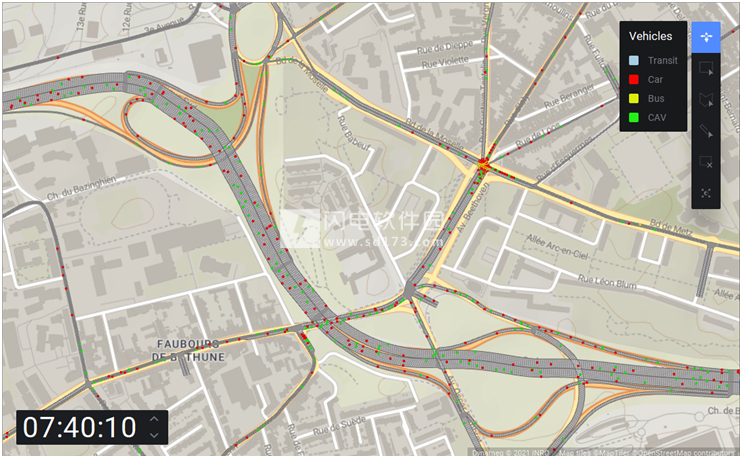
CAV现在可以建模为一种新的车辆类型,其中包括一个称为“连接响应时间”的附加属性。当引导车辆是另一CAV时,连接响应时间用于定义CAV与其引导车辆之间的最小车头时距。当跟随非CAV车辆时,CAV的最小车头时距为CAV车辆类型的标准响应时间。
CAV车辆的示例如下图所示。
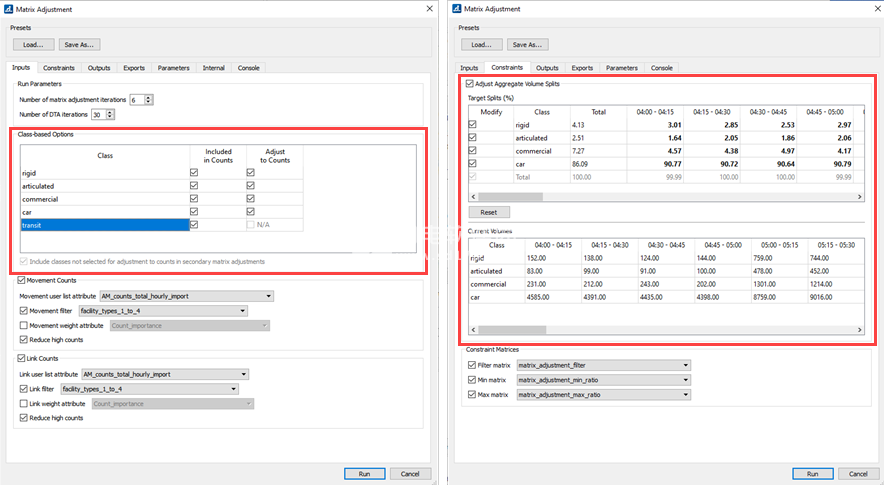
2、基于仿真的矩阵调整
此版本包括对基于模拟的矩阵调整功能的几个增强,包括基于类的选项和调整聚合体积分割。
基于类的选项包括:
使用仅代表车辆类别子集的交通量计数
将矩阵调整限制在交通计数所代表的车辆类别的子集上
调整聚合体积分割允许用户为每个分配间隔指定调整后的矩阵中所需的分割百分比。如果需要,这些调整可以仅应用于调整后的矩阵的子集,并且可以应用于免于其他矩阵调整计算的类别。
如果需要,新选项可以免除任何车辆类别的矩阵调整计算的所有组件。
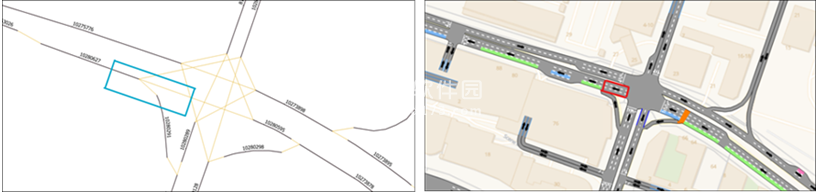
3、从Aimsun创建场景
现在可以直接从Aimsun的导出到形状文件功能生成的形状文件创建场景。这些文件提供了大多数基本的网络几何结构和网络元素之间的连接。建议使用Aimsun的表视图导出和/或API生成其他CSV文件。这些文件提供额外的车道信息、公交数据、信号数据和车辆财产。
4、更新从CUBE导入过程
在使用CUBE文件创建新场景时,添加了以下增强功能。
添加了一个新的可选节点属性Signalized。此属性需要标识信号节点的字段。提供时,将相应地设置节点属性控制类型(0=无信号;1=信号)。
已添加对CUBE转弯惩罚文件的可选导入的支持。此文件用于在导入的网络中设置转弯禁止。
从CUBE导入的质心现在更接近于其在CUBE中的原始位置。中导入的质心的X-Y坐标先前取决于连接器长度,并且可能相对远离CUBE节点。
已添加以下可选链接属性:
设施类型-需要一个标识CUBE设施类型的字段。如果启用,“设施类型”框变为可用,用于定义CUBE和DYNAMEQ设施类型之间的对应关系。
类组-需要标识链接类组的字段:表示给定链接上一组允许的类的唯一标识符。
斜坡-如果可用,此二进制值可用于改善连接节点处的斜坡对齐。
放弃链接形状两端的形状点的选项已修改为现在删除距链接端点指定距离内的形状点。
增加了对创建车辆类别组和导入行程文件的支持。
添加了从CUBE transit.lin或shapefile导入传输数据的支持。
5、对用户路径的增强
以下增强功能已添加到用户路径的编辑和验证中。
路径验证
路径验证现在包含在整个网络验证过程中。路径的错误和警告现在会报告给Console窗口。
修复断开的路径
如果路径包含一个或多个禁止移动或缺少链接,则该路径处于断开状态。断开的路径在Project Explorer中以红色字体标识。选中后,路径将在网络上绘制为红色轮廓。
新命令已添加到路径上下文菜单中。通过“修复路径”命令,可以使用最短路径搜索自动重新连接路径的所有不相交部分。虽然比手动重新连接操作更不灵活,但在某些情况下,它也足够了。完成后,将在选定的断开路径下绘制建议的路径。
要接受建议的路径,请选择“完成路径”。维修路径操作的详细信息显示在控制台窗口中。
如果修复路径操作失败,将显示一个信息消息框,如下所示。
“编辑路径”命令现在支持断开的路径。现在可以使用新的部分路径重新连接任意两个链接。部分路径的第一个和最后一个链接必须是原始路径的一部分,操作才能成功。
无法根据断开的路径计算路径表达式。断开路径的表达式值现在在“路径值”窗口中显示“未定义”值,如下图所示。
网络>路径和模拟结果>路径工作表不显示断开的路径。现在,相应的路径列表被过滤为仅包含有效路径。
6、信号定时计划生成器的增强功能
现在可以使用存储在移动域中的用户属性中的转弯量作为信号计时计划生成器的转弯量源。如果使用用户输入周转量,则会为用户属性的每个间隔生成不同的计划。对于每个计划,将计算每个交叉口的信号配时,该交叉口在该间隔内至少有一个转弯且转弯量为非零。由于使用指定DTA的周转量结果作为周转量来源,新生成的控制计划可与现有计划合并。
“生成信号定时计划”对话框已重组为两个选项卡:“常规”和“信号协调”。手动协调的道路现在由场景中可用的一个或多个用户路径定义。
一个新的选项“允许允许转弯”可以更好地控制生成的相位类型。如果未选中此选项,则生成的信号相位将不包含任何允许的移动,即每个相位仅包含彼此不冲突的移动。信号定时计算将根据相位设计产生不同的结果,因此将受到该选项的影响。
7、热启动DTA的增强功能
对于参考DTA本身为热启动DTA的情况,最小热启动灵敏度值的计算现在考虑参考DTA的灵敏度值。最小灵敏度值对应于1/(1/S0+N0),其中S0是参考DTA的灵敏度,N0是参考EDTA的完成迭代次数。
创建DTA规范向导和编辑DTA规范窗口中出现的热启动灵敏度控制小部件现在显示最小/最大值以及滑块上方的刻度线。与当前滑块位置相对应的值显示为小数和十进制值。
如果参考DTA是热启动DTA,则小部件现在只接受可表示为1/(1/S0+N0)的灵敏度值,如上文所定义,或者如果引用DTA不是热启动DTA,则接受1/N0。
8、遍历矩阵计算中虚拟链接的处理需求
“创建遍历矩阵规范”对话框中添加了一个新选项,它确定了遍历矩阵计算如何处理在网络外等待虚拟链路的车辆。对虚拟链接的需求可以通过两种方式计算:
生成车辆时计数:
对于子区域内的起始区域,车辆到达子区域的时间为生成时间。如果车辆在虚拟链路上没有经历任何等待时间(由于连接器上的拥塞),则生成车辆的时间与车辆进入连接器的时间相同
对于子区域外的原始区域:如果连接器是到达一个或多个子区域入口连接器(门)的链路组的一部分,则车辆到达子区域的到达时间为生成时间加上从连接器入口到子区域连接器入口的自由流时间。
车辆进入连接器时计数:
对于子区域内的起始区域,车辆到达子区域的时间是车辆进入连接器的时间。
对于子区域外的原始区域:如果连接器是到达一个或多个子区域入口连接器(门)的链路组的一部分,则车辆到达子区域的时间为其进入连接器的时间加上从连接器入口到子区域连接器入口的自由流动时间。
在车辆进入连接器时使用Count(计数)选项等同于早期版本DYNAMEQ中的逻辑。
9、维修
桌面
车辆类别的最大数量已从16个增加到32个。
现在可以为质心域创建用户定义的结果属性。因此,用户定义的质心结果属性现在可用于导出、显示在模拟结果工作表和时间序列窗口中。有关创建用户定义的结果属性的详细信息,请参阅用户手册中的创建用户定义结果属性。
更正了存在中断路径的问题,这将阻止加载场景。有关详细信息,请参见与路径相关的增强功能。
更正了当传输线的所有节点都无法匹配时导入Emme传输文件的问题,从而导致一条线没有线段。现在,当导入完成时,将正确忽略并在控制台中报告传输线。
导入使用完整格式定义的矩阵文件,现在可以正确设置标记VEH_class下的车辆类别。生成的输入矩阵的车辆类别先前设置为默认值。
研究期间现在默认设置为00:00-24:00,不能再修改。
从这里创建场景
现在可以从链接两端的指定距离处删除造型点,而不是指定要删除的造型点的数量。
Shapefile属性object_id和streetname现在是可选的。
更正了GeoPackage层和shapefile属性的自动映射。
更正了对网络中的所有链接使用相同的链接组值时执行遍历矩阵操作的问题。此操作可能导致软件意外关闭。否则,遍历矩阵的计算是正确的。
在编辑规范时,更正了“子区域”列表和“链接分组方式”(现在简称为“链接组”)选项的“遍历矩阵规范”对话框初始化。
从Visum文件创建场景现在支持带有主节点的Visum网络。
更正了重命名DTA使用的车辆类别的问题,这将阻止运行“最后一次运行”和“继续”操作。
打开会聚窗口时,音量最高的车辆vlass现在是默认选择。
美国石油学会
过滤器或集合定义的创建/删除现在已正确保存。以下项目方法受此修复程序影响:
create_filter_definition()和delete_filter_finition()
create_set()和delete_set(
如4.4.0 API参考中所述,添加了Path方法links()和属性num_links。
过滤器和集合创建/删除操作现在已正确保存在项目中
更正了在DTA迭代回调函数上下文中使用ClassData.compute_skim_matrix()方法的问题,这将导致调用ClassData.demand_matrix方法时出现异常。
DTA迭代回调:需求回调生成的最终需求矩阵的名称已修改为demandcallback_<class_name>。这个更通用的名称将避免矩阵选择器窗口的潜在问题。
纠正了DTA.get_simulation_results(class_names)在DTA未分配一个或多个给定类名时出现的问题。
10、项目兼容性和升级
首次在DYNAMEQ 23.0.0中打开时,将升级使用早期版本创建的项目。
将删除使用早期版本DYNAMEQ创建的项目的DTA结果。通过重新运行DYNAMEQ早期版本中创建的DTA所获得的结果不会完全重现之前的结果,但对于稳定、收敛良好的DTA,差异预计会很小。
安装激活教程
1、在本站下载并解压,如图所示

2、安装程序,勾选我接受协议
3、安装目录设置
4、安装完成,将patch补丁复制到安装目录中,管理员身份运行,输入提供的name、password,点击patch进行修补破解

、
闪电小编说明:
DYNAMEQ 是一款用于基于车辆的交通模拟和动态交通分配 (DTA) 的软件,可为任何规模的一致运营交通建模提供高保真平台。从现场影响研究到拥挤的走廊,再到全市的交通规划,DYNAMEQ清晰一致地展示了整个地区的交通模式如何应对基础设施、运营、定价和需求的变化。有效改善交通流量,使用整个城市的详细交通模型模拟和评估交通研究。
 DYNAMEQ CONNECT Edition 2023 (23.00.01.23)
DYNAMEQ CONNECT Edition 2023 (23.00.01.23)
 牙科CAD设计软件 exocad Dental
牙科CAD设计软件 exocad Dental Synopsys CoreTools vW-2024.09-
Synopsys CoreTools vW-2024.09- AviCAD 2025 Pro 25.0.10.5 x64
AviCAD 2025 Pro 25.0.10.5 x64  Synchro plus SimTraffic 12.2.5
Synchro plus SimTraffic 12.2.5 Kenny Asset Forge 2.5.0
Kenny Asset Forge 2.5.0 CPFD Barracuda Virtual Reactor
CPFD Barracuda Virtual Reactor