简化项目沟通和团队合作。使用标准文件格式或通过Pix4D Cloud在线安全地与您的团队,客户和供应商选择性安全地共享项目数据
软件功能
一、多种工具可为各行业的应用提供支持
桌面和云
1、调查级结果
以厘米为单位获得结果。X,Y方向1-2像素GSD Z方向1-3像素GSD
2、完全控制您的项目
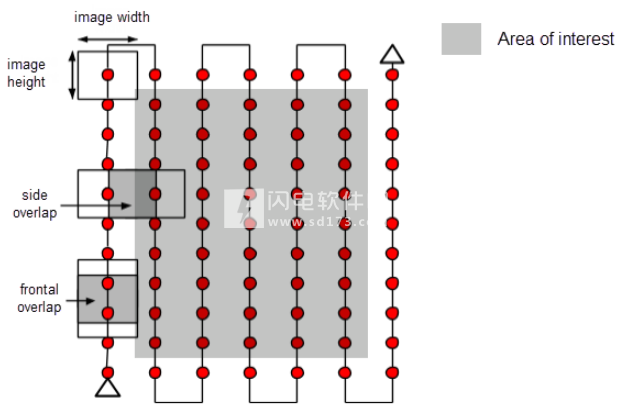
定义感兴趣的区域,选择处理选项,添加地面控制点或编辑点云,DSM,网格和正交马赛克。
3、您的工作流程,您的选择
使用默认模板进行自动处理,或者使用自定义设置来完全控制质量,数据和项目。选择何时以及如何使用云和桌面处理。
二、rayCloud
摄影测量软件的强大功能
将原始图像连接到3D重建的每个点的独特环境,以可视方式验证并提高项目的准确性。
三、精确的3D地图和模型,完全来自图像
1、自动点云分类
通过机器学习分类过程区分对象。
2、展平和平滑数字表面
创建表面以改善平面度或在关键区域填充孔。
3、轻松测量表面,距离,体积和高程
在完全可调的基础高度下进行3D测量。
4、检查和注释
u远程检查项目并准确查明,突出和描述关键元素。
5、协作与分享
与您的团队,客户或其他利益相关者选择性安全地共享项目数据和见解。
四、照片先
任何相机。任何无人机。任何图像。只要是.jpg或.tif。
RGB图像
无人机图像
多光谱图像
热图像
鱼眼镜头图像
360°相机影像
相机装备图像
影片
五、您的项目。您的工具。
轻松将数字地图和模型导出为行业兼容格式,以进行进一步分析或报告。
使用帮助
一、输入和输出
1、输入项
Pix4Dmapper的主要输入是可以是JPEG或TIFF文件的图像。视频文件也可以导入并用于处理(而不是静止图像)。
警告:请勿修改图像,即不要旋转或编辑图像。修改图像会改变相机的几何特性,并可能降低结果质量。
延期 描述
.jpg,.jpeg JPEG图像
.tif,.tiff 单色TIFF
多频带TIFF(RGB /红外/热敏)
1层(无金字塔,无多页)
8、10、12、14、16位整数,浮点
.avi,.mp4,.wmv,.mov 可以导入Pix4Dmapper的视频文件
2、产出
Pix4Dmapper可以生成以下输出:
相机参数(内部参数,外部参数,Bingo,SSK):这些文件描述了相机和图像的内部(焦距,...)或外部参数(位置和方向)。
不失真的图像
致密点云(.las,.laz,.xyz,.ply):这是重建模型的一组3D点。X,Y,Z位置和颜色信息将存储在致密点云的每个点上。
数字表面模型(Grid DSM,Raster DSM):这是映射区域的2.5 D模型,其中包含(X,Y,Z)信息,但不包含颜色信息。
数字地形模型(DTM :Raster DTM):这是在滤除包含建筑物(X,Y,Z)信息但不包含颜色信息的对象(例如建筑物)之后的2.5D模型区域。
Orthomosaic(GeoTIFF,KML文件,Google Maps HTML文件):通过混合几张正照片制成的2D模型(地图)。颜色平衡,视觉上令人愉悦。
索引图(GeoTIFF,彩色KML文件,网格Shapefile):每个索引都关联有一个索引图。对于该图上的每个像素,该像素的值均从关联的反射率图得出。
3D纹理网格(.obj,.fbx,.dxf,.ply,.pdf,.osgb,.slpk):这是模型形状的表示,该模型由顶点,边缘,面和图像纹理组成投影在上面。呈现和可视化模型,共享模型并将其上传到在线平台(例如Sketchfab)非常有用。
等高线(shp,.pdf,.dxf):这些是连接等高点的线。它们之所以有用,是因为它们可以更好地理解地图上陆地表面的形状(地形)。
视频动画(.mp4,.mkv,.avi )
3D数字化对象:折线,曲面,体积基准面(.shp,.dxf,.kml,.dgn )
 Pix4Dmapper Enterprise 4.5.6 x64破解版
Pix4Dmapper Enterprise 4.5.6 x64破解版


 牙科CAD设计软件 exocad Dental
牙科CAD设计软件 exocad Dental Synopsys CoreTools vW-2024.09-
Synopsys CoreTools vW-2024.09- AviCAD 2025 Pro 25.0.10.5 x64
AviCAD 2025 Pro 25.0.10.5 x64  Synchro plus SimTraffic 12.2.5
Synchro plus SimTraffic 12.2.5 Kenny Asset Forge 2.5.0
Kenny Asset Forge 2.5.0 CPFD Barracuda Virtual Reactor
CPFD Barracuda Virtual Reactor